The objective of this study was to evaluate if canopy cover, topographic obstruction of the sky, and differences among vegetation type affected performance of global positioning system (GPS) telemetry in southern Ecuador. A GPS collar was placed at 30 test sites in Podocarpus National Park, Ecuador, and we estimated canopy cover and topographic obstruction at each site. The mean fix success rate was 87.7% (SD=22.3%), and the mean location error for test sites was 9.7m (SD=4.17m). Canopy cover significantly reduced the performance of GPS telemetry in our study area both in terms of location error and fix acquisition rate. However, topographic obstruction did not significantly influence location errors or fix acquisition rate. Screening data to remove less accurate, two-dimensional fixes resulted in an 11% data loss and reduced the mean location error by 3.8m. Understanding how habitat variables influence fix acquisition and location errors of GPS collars will assist researchers in evaluating potential biases and developing methods to correct for the effect of such biases on analyses of habitat use and animal movements in the tropical Andes in southern Ecuador.
Global positioning system (GPS) telemetry enables remote collection of large quantities of animal locations at all times over broad geographic areas. Despite the advantages of GPS technology, habitat characteristics can influence performance of GPS telemetry in ways that can potentially bias analyses that rely on GPS locations (Dussault et al., 1999; Frair et al., 2010; Lewis et al., 2007). Therefore, the capability of GPS telemetry devices should be evaluated in the field before they are used in studies of animal ecology, and appropriate corrective measures (e.g., correction or weighing factors) taken prior to analysis (Dussault et al., 1999; Webb et al., 2013).
There are two types of errors associated with GPS telemetry. One type is unsuccessful fix acquisition, which results in missing location data (D’Eon et al., 2002; Frair et al., 2004). A second type of error is location inaccuracy that occurs when the GPS unit records a location that is inaccurate (Frair et al., 2004). Habitat features that influence the ability of a GPS unit to receive satellite signals can result in both types of location errors; these include percent of vegetation canopy cover, vegetation cover type, and rugged terrain (D’Eon et al., 2002; Frair et al., 2004; Rempel et al., 1995). Other factors that can influence the errors of GPS collars include weather conditions, time of day, season, animal behavior, as well as the time interval between attempted fixes, device orientation, time in the field, and device manufacturer and model (Dussault et al., 2001; Frair et al., 2004; Matthews et al., 2013; Sager-Fradkin et al., 2007). Furthermore, GPS units are capable of recording either three-dimensional (3-D) fixes or two-dimensional fixes (2-D). A 2-D fix is recorded when signals are received from only three satellites, and a 3-D fix is achieved when signals are received from ≥4 satellites; 3-D fixes are typically more accurate than 2-D fixes (Di Orio et al., 2003).
Our objective was to evaluate how canopy cover and topographic obstruction affected the total fix rate, 3-D fix rate, and location error in the tropical Andes of southern Ecuador. We expected that both location accuracy and fix success rate would be negatively influenced by increasing vegetation canopy cover and topographic obstruction of the sky. Such evaluations have been conducted frequently in North America and have been reported for tropical lowlands; however, to our knowledge, performance of GPS telemetry collars has not been systematically evaluated and reported for lower latitudes and rugged terrain in South America.
MethodsStudy siteThe study area is located in Podocarpus National Park (PNP) in southern Ecuador (4°17′0″ S, 79°0′0″ W). Elevation in the Park varies between 800 and 3695m, and the area receives up to 6000mm of rain per year. The grass páramo occurs between 3335 and 3385m, and the vegetation is dominated by forbs, Chusquea bamboo and other grasses, and woody plants less than 10cm tall (Keating, 1999). The shrub páramo occurs below 3335m and nearly 100% of the area is covered by shrubs and bromeliads. The vegetation below 3150m is the cloud forest and is dominated by trees including three species of the genus Podocarpus.
GPS testingWe stratified the study area by vegetation type and then selected representative locations at random within each stratum, with the constraint that locations were within 1km of a road or trail. We tested 30 different locations. We randomized the order of locations during the deployment period to avoid a potential bias associated with variation in GPS performance due to weather, which changed frequently, even within days. We classified the vegetation types as grass, which included the grass páramo; shrub, which included the shrub páramo type; and tree, which included pine forest, cloud forest and rain forest. The minimum distance between test sites was 650m, and the maximum distance was 31km. The entire study region covered approximately 47,900ha.
We used an Iridium/GPS Location Collar (Model G2110E; Advanced Telemetry Systems, Isanti, MN, USA) weighing 825g programmed to record a location every 30min to evaluate the influence of habitat on GPS performance. We placed the collar on a stand approximately 1m above the ground in a vertical position with the antenna facing upward at each of the 30 test sites for a 24-h period during 29 May–12 July 2012. The GPS collar attempted to record at least 48 fixes per test site, and our sampling unit was the 30 independent test sites.
At each test site, we recorded the percent canopy cover above the collar using a spherical densiometer, and we calculated the available sky (i.e., the inverse of terrain obstruction) from each test site using the viewshed function in 3-D spatial analyst in ArcGIS 10 (ESRI, Redlands, CA). To do this, we created a layer of points in the sky 100m above the highest point in the study area, and from each test location, we calculated the percentage of points that were visible from the test site to provide a value of available sky (D’Eon et al., 2002).
Data analysesWe recorded the actual location of collar test sites with a handheld GPS unit (Garmin, GPSMAP 60CSx). For each location we allowed the handheld GPS unit to average multiple fixes to improve location accuracy. We recorded a location after the estimated accuracy was <6m. We calculated location errors of the GPS collar by determining the distance between the actual location and the estimated location recorded by the collar using Spatial Analyst in ArcGIS 10 (ESRI, Redlands, CA). The fix rate was quantified as the proportion of attempted fixes that were successful. We compared location error and fix rate among habitat types using a one-way analysis of variance (ANOVA). We tested if percent canopy cover and available sky were correlated using a Pearson product-moment correlation. We evaluated multiple linear regression models of location error and fix rate that included the continuous variables of percent canopy cover and available sky (PROC REG; SAS Institute, Inc., Cary, NC, USA). We performed an arcsin transformation on the response variables for overall fix rate and 3-D fix rate because they were proportional data (Zar, 1999). The test location was the experimental unit (n=30); however, individual fixes were considered independent samples to compare 2-D and 3-D location errors using Student's two-sample t-test.
ResultsMean percent canopy cover was 0% in the grass vegetation type 76% in the shrub type (range=0–93%, SE=14%), and 88% in the tree type (range=34–96%, SE=10%). Missed fixes tended to occur in areas with high canopy cover. The mean fix rate for the GPS collar at the 30 test sites, across all three vegetation types, was 87.7% (SD=22.3%, range=6–100%). The mean fix rate was 100% in the grass vegetation type, 70% in shrub and 83% in the tree vegetation, and fix success did not significantly differ among vegetation types (F27, 29=2.65, p=0.09, Table 1). Canopy cover and available sky were not correlated (n=30, r=−0.22, p=0.27). Based on the R2 values, canopy cover and available sky together explained 32% of the variation in fix rate. Canopy cover had a negative, significant effect on fix rate (b=−0.57, t27=−3.18, p=0.004). As canopy cover increased, fix rate decreased. In contrast, available sky did not significantly influence fix rate (b=0.32, t27=0.56, p=0.58).
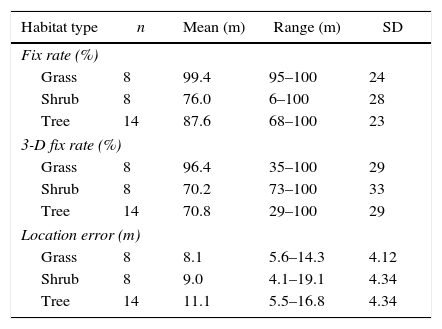
Overall fix success rates, 3-dimensional (3-D) fix rates, and location errors recorded by a GPS collar at test sites (n=30) in 3 habitat types in the Andean Mountains in southern Ecuador.
| Habitat type | n | Mean (m) | Range (m) | SD |
|---|---|---|---|---|
| Fix rate (%) | ||||
| Grass | 8 | 99.4 | 95–100 | 24 |
| Shrub | 8 | 76.0 | 6–100 | 28 |
| Tree | 14 | 87.6 | 68–100 | 23 |
| 3-D fix rate (%) | ||||
| Grass | 8 | 96.4 | 35–100 | 29 |
| Shrub | 8 | 70.2 | 73–100 | 33 |
| Tree | 14 | 70.8 | 29–100 | 29 |
| Location error (m) | ||||
| Grass | 8 | 8.1 | 5.6–14.3 | 4.12 |
| Shrub | 8 | 9.0 | 4.1–19.1 | 4.34 |
| Tree | 14 | 11.1 | 5.5–16.8 | 4.34 |
The mean location error for all test sites was 9.7m (SD=4.2m; range=4.1–19.1m). As with fix acquisition, location errors did not differ among vegetation types (F27, 29=1.46, p=0.25, Table 1). Unlike fix success, however, location errors were not significantly influenced by either canopy cover (b=2.06, t27=1.05, p=0.30) or available sky (b=−4.19, t27=−0.66, p=0.52).
Approximately 11% of the GPS collar locations recorded in our study were 2-D fixes, and their location errors were slightly larger than those of 3-D fixes. The mean location error for 2-D fixes (n=124) was 12.7m (SE=0.87m), which was significantly higher than the mean location error of the 3-D fixes (n=992; 8.9m; t147=−3.77, p=0.001). Location errors of 3-D fixes were significantly influenced by canopy cover (t25=−3.50, p=0.004), but not by available sky (t25=0.61, p=0.55). There was a significant difference in 3-D fix rates among vegetation types (F27, 29=3.77, p=0.04, Table 1). Locations in the grass vegetation had a significantly higher 3-D fix rate than locations in the tree vegetation (t=2.39, p=0.012), but grass and shrub locations did not differ (t=1.97, p=0.06), nor did shrub and tree locations (t=0.47, p=0.65).
DiscussionIn general, GPS telemetry performed well in the páramo ecosystem, but performance was less reliable in areas with greater canopy cover. Although Podocarpus National Park is characterized by knife ridges with deep ravines, terrain obstruction did not markedly reduce GPS performance to the extent we documented for tree canopy cover. Potential satellite signals can be blocked and reflected by tree canopies, which could explain the negative influence of canopy cover on fix acquisition rates. These results are consistent with other studies in which canopy reduced performance of GPS telemetry collars (D’Eon et al., 2002; Frair et al., 2004; Hebblewhite et al., 2007), but our results differed somewhat because of the negligible influence of available sky (D’Eon et al., 2002).
On average, the fix rate in our study (87.7%) represented a failure to record locations during <15% of attempts, which is comparable to ranges reported for stationary collars in other studies (Tobler, 2009). In contrast, our location errors were relatively modest (overall mean error=9.7m) and robust with respect to both terrain and canopy cover; this value also is within the ranges reported for other studies of GPS collar performance (e.g., Lewis et al., 2007; Frair et al., 2010). However, because there was error associated with the handheld GPS unit (<6m) that we used to record the true location of the GPS collar, location errors for the GPS collar fixes could be slightly higher.
Although many home range estimators are generally robust to variation in telemetry acquisition rates and location errors, the low fix rates achieved in areas with relatively high canopy cover potentially present a challenge for studies evaluating habitat selection (Frair et al., 2010). Information about the magnitude of the influence of habitat features on the fix rate provides a basis for developing correction factors (Webb et al., 2013; Wells et al., 2014) and accounting for the biases in analyses of habitat selection (Pearce and Boyce, 2006). The magnitude of location errors can be reduced by screening location data that are likely to be less accurate (e.g., 2-D fixes). However, this results in a tradeoff between location accuracy and numbers of animal locations (Lewis et al., 2007), which must be evaluated relative to study objectives. Recent analytical methodologies and frameworks have developed correction and weighting factors that can be explicitly modeled on movement and resource selection studies to avoid bias associated with missed GPS fixes and location error (Webb et al., 2013; Wells et al., 2014). Our results suggest that researchers who wish to employ GPS telemetry to study resource selection by animals in the high Andes of southern Ecuador will need to account for habitat-related biases in acquisition of location data, but that location errors are likely to be small relative to the size of areas traversed by large mammals.
Use of remote animal monitoring in the Andes will allow researchers to collect detailed data on space use and movement patterns of elusive species that are difficult to study in such inaccessible terrain. But researchers must first overcome sources of bias when using GPS telemetry to avoid over or underestimating movement behavior or selection of resources. Explicitly modeling these errors or developing weighting factors can reduce bias associated with missed fixes and location error, will increase accuracy of animal location data and facilitate decision making for high priority conservation issues, particularly when dealing with rare or elusive species.
Conflicts of interestThe authors declare no conflicts of interest.
We thank the National Science Foundation and the University of Idaho for funding this project. Thanks to Stephen Webb for a review of a previous draft and to two anonymous reviewers for helping to improve our manuscript.

